-
Servo motor VS. Stepping motor.. คืออะไร ใครรู้บ้าง ?
Stepping motor
เป็นมอเตอร์ไฟฟ้าที่ขับเคลื่อนด้วยพัลส์ (pulse) การที่เราจะควบคุมการหมุนมอเตอร์ประเภทนี้ให้ครบหนึ่งรอบนั้น จำเป็นจะต้องจ่ายพัลส์เป็นสเต็ป โดยในแต่ละสเต็ปจะขับเคลื่อนได้เพียงแค่ 1, 1.5, 1.8 หรือ 2 องศาขึ้นอยู่กับโครงสร้างของตัวมอเตอร์
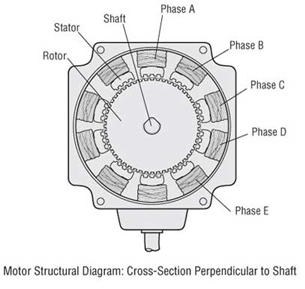
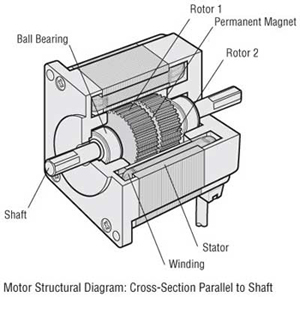
โครงสร้างของ Stepping motor
โครงสร้างภายในของอุปกรณ์ตัวนี้ประกอบไปด้วยขั้วแม่เหล็กบนสเตเตอร์ (stator) ทำจากแผ่นเหล็กวงแหวน มีซี่ยื่นออกมาประกอบกันเป็นชั้นโดยที่แต่ละซี่นั้นก็จะมีขดลวด (coil) พันอยู่
การควบคุม Stepping motor
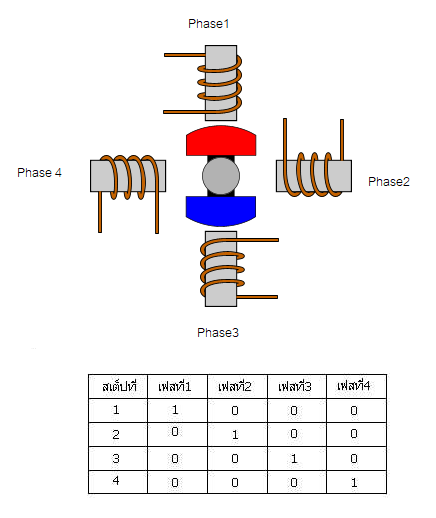
สำหรับการสั่งงาน สามารถทำได้ด้วยการป้อนกระแสไฟให้กับขดลวดของสเตปปิ้งมอเตอร์ (Stepping motor) ทีละขดเรียงไปตามลำดับ ดังนั้นกระแสที่ไหลในขดลวดจึงไหลไปในทิศทางเดียวกันทุกขด
Servo motor
เป็นมอเตอร์ที่มีโครงสร้างใกล้เคียงกับอินดั๊กชั่นมอเตอร์ (Induction motor) แต่จะมีความแตกต่างกันตรงที่ตัวเซอร์โวมอเตอร์ (Servo motor) ที่สามารถควบคุมแบบป้อนกลับ (Feedback control) ได้
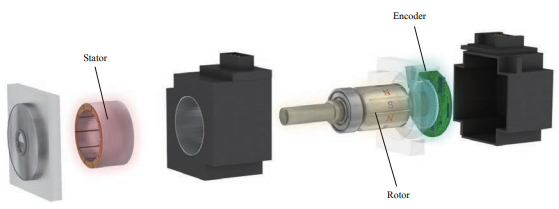
โครงสร้างของ Servo motor
โครงสร้างของ AC Servo motor จะมีลักษณะคล้ายกับมอเตอร์ 3 เฟสทั่ว ๆ ไปที่ประกอบด้วยสิ่งสำคัญ 2 ส่วน ได้แก่ สเตเตอร์และโรเตอร์ โดยสเตเตอร์จะมีขดลวด 3 ชุด ตัวโรเตอร์ที่ทำจากแม่เหล็ก และตัวสุดท้ายในส่วน Encoder ที่จะทำหน้าที่ส่งสัญญาณป้อนกลับไปยังชุดควบคุม
การควบคุม Servo motor
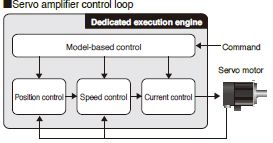
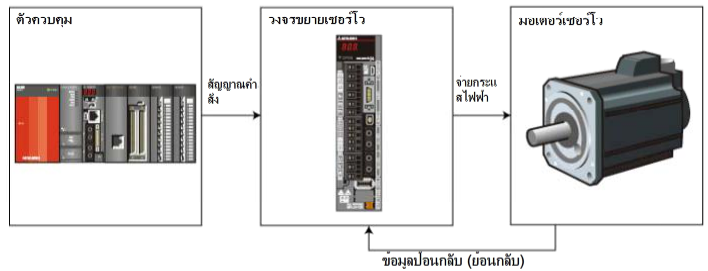
Servo motor จะรับคำสั่งโดยการส่งสัญญาณพัลส์ (Pluse command) เข้าที่ลูปควบคุม จากนั้นลูปควบคุมก็จะสั่งการไปยังลูปควบคุมย่อยอีก 3 ลูป ได้แก่ Position Control Loop, Speed Control Loop และ Current Control Loop ซึ่งลูปควบคุมย่อยเหล่านี้จะรับสัญญาณป้อนกลับจาก Servo motor โดยมีหลักการทำงานดังต่อไปนี้
- Position Control Loop >> ทำหน้าที่ควบคุมตำแหน่งโดยใช้สัญญาณป้อนกลับจาก Servo Motor
- Speed Control Loop >> ทำหน้าที่ควบคุมความเร็วโดยใช้สัญญาณป้อนกลับจาก Servo Motor
- Current Control Loop >> ทำหน้าที่ควบคุมแรงบิดโดยสัญญาณป้อนกลับจากอุปกรณ์ตรวจจับกระแส
สรุปความแตกต่างระหว่าง…” Servo Motor & Stepping Motor “
–> Servo Motor ในส่วนของการควบคุมตำแหน่งมีความแม่นยำสูง สามารถทำความเร็วได้หลายพันรอบต่อนาที นอกจากนี้ยังส่งกำลังได้อย่างเสถียรไม่ว่าจะใช้ความเร็วเท่าใดก็ตาม แต่…มีข้อเสียในเรื่องของความซับซ้อนทางการใช้งานเพราะต้องใช้เป็นรูปแบบ Close Loop เท่านั้น
–> Stepping Motor ในส่วนของการควบคุมตำแหน่งมีความแม่นยำ ไม่ซับซ้อนเนื่องจากไม่จำเป็นต้องใช้รูปแบบ Close Loop แต่…มีข้อจำกัดเรื่องของความเร็วอยู่ที่ 1,200 รอบต่อนาทีหรือน้อยกว่านั้นซึ่งความเร็วที่เกิดขึ้นที่มีผลต่อแรงบิดด้วย